Hochschulschrift
Einstufige approximative optimale stochastische Planung neuer Robotertrajektorien in Echtzeit
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Deutsch
- Anmerkungen
-
München, Univ. der Bundeswehr, Diss., 2006
- Klassifikation
-
Elektrotechnik, Elektronik
- Schlagwort
-
Flughafen ; Gepäck ; Transportsystem ; Bahnplanung ; Industrieroboter ; Stochastische Optimierung
- Urheber
- URN
-
urn:nbn:de:bvb:706-1786
- Rechteinformation
-
Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
25.03.2025, 13:42 MEZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Objekttyp
- Hochschulschrift
Beteiligte
Ähnliche Objekte (12)

Einstufige Zapfwellenpumpe

Einstufige Zapfwellenpumpe

Einstufige Zentrifugalpumpe (Rückansicht)
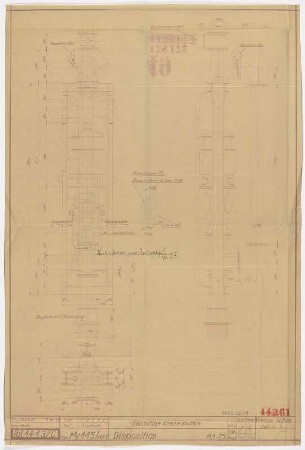
Einstufige Kreiselpumpe, Disposition
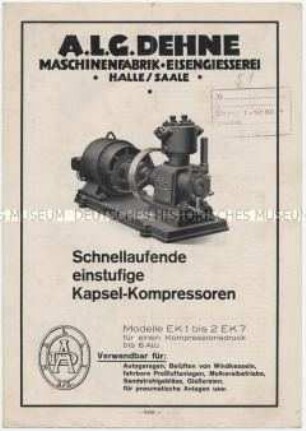
Schnellaufende einstufige Kapselkompressoren
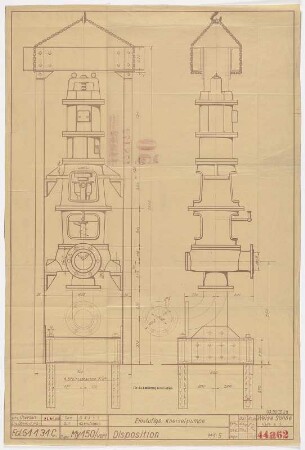
Einstufige Kreiselpumpe, Disposition
Einstufige, alte Rohrgitterkaskade
Optimale stochastische Kontrolle dynamischer ökonomischer Systeme
Optimale Strategien für stochastische Scheduling-Probleme
Optimale sequentielle Stichprobenpläne für stochastische Prozesse
Construction approximative.
Estimations approximatives
Einstufige Zapfwellenpumpe
Einstufige Zapfwellenpumpe
Einstufige Zentrifugalpumpe (Rückansicht)
Einstufige Kreiselpumpe, Disposition
Schnellaufende einstufige Kapselkompressoren
Einstufige Kreiselpumpe, Disposition
Einstufige, alte Rohrgitterkaskade
Optimale stochastische Kontrolle dynamischer ökonomischer Systeme
Optimale Strategien für stochastische Scheduling-Probleme
Optimale sequentielle Stichprobenpläne für stochastische Prozesse
Construction approximative.
Estimations approximatives
Einstufige Zapfwellenpumpe
Einstufige Zapfwellenpumpe
Einstufige Zentrifugalpumpe (Rückansicht)
Einstufige Kreiselpumpe, Disposition
Schnellaufende einstufige Kapselkompressoren
Einstufige Kreiselpumpe, Disposition
Einstufige, alte Rohrgitterkaskade
Optimale stochastische Kontrolle dynamischer ökonomischer Systeme
Optimale Strategien für stochastische Scheduling-Probleme
Optimale sequentielle Stichprobenpläne für stochastische Prozesse
Construction approximative.