Energie-optimale Trajektorien für seilbasierte Manipulatoren unter Verwendung von passiven Elementen
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Deutsch
- Anmerkungen
-
In: First IFToMM D-A-CH Conference 2015 : 11. März 2015, TU Dortmund
- Klassifikation
-
Elektrotechnik, Elektronik
- Schlagwort
-
Bemessung
Trajektorie
Reglerentwurf
Seilroboter
Betriebsverhalten
- Ereignis
-
Veröffentlichung
- (wo)
-
Duisburg, Essen
- (wer)
-
Universität Duisburg-Essen
- (wann)
-
2015
- Urheber
- DOI
-
10.17185/duepublico/37261
- URN
-
urn:nbn:de:hbz:464-20150327-083007-8
- Rechteinformation
-
Open Access unbekannt; Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
14.08.2025, 10:55 MESZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Beteiligte
- Reichert, Christopher
- Unterberg, Ulrich
- Bruckmann, Tobias
- Universität Duisburg-Essen
Entstanden
- 2015
Ähnliche Objekte (12)

Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen
Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen

Zeiteffiziente Trajektorien-Planung und Kinematik-Regelung für serielle Manipulatoren mittels Clifford Algebra
Handbuch der passiven Sonnenenergienutzung
Präzisionsfügen mit passiven Fügehilfen
Nachweisung der passiven Zahlungsrückstände
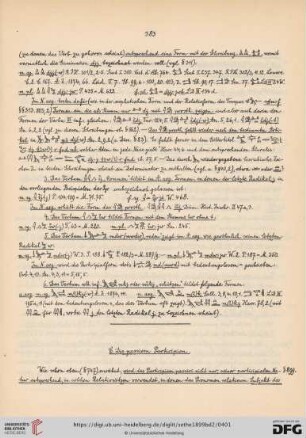
C. Die passiven Participien
Abbau des passiven Widerstandes
Handbuch der passiven Kühlung
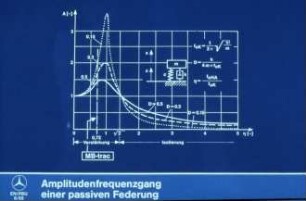
Amplitudenfrequenzgang einer passiven Federung

a) Die passiven Werkzeuge.
Aufhebung des passiven Widerstandes
Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen
Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen
Zeiteffiziente Trajektorien-Planung und Kinematik-Regelung für serielle Manipulatoren mittels Clifford Algebra
Handbuch der passiven Sonnenenergienutzung
Präzisionsfügen mit passiven Fügehilfen
Nachweisung der passiven Zahlungsrückstände
C. Die passiven Participien
Abbau des passiven Widerstandes
Handbuch der passiven Kühlung
Amplitudenfrequenzgang einer passiven Federung
a) Die passiven Werkzeuge.
Aufhebung des passiven Widerstandes
Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen
Planung kinematischer Trajektorien für Manipulatoren mit Hilfe von Subzielen und neuronalen Netzen
Zeiteffiziente Trajektorien-Planung und Kinematik-Regelung für serielle Manipulatoren mittels Clifford Algebra
Handbuch der passiven Sonnenenergienutzung
Präzisionsfügen mit passiven Fügehilfen
Nachweisung der passiven Zahlungsrückstände
C. Die passiven Participien
Abbau des passiven Widerstandes
Handbuch der passiven Kühlung
Amplitudenfrequenzgang einer passiven Federung
a) Die passiven Werkzeuge.