Hochschulschrift
Entwicklung eines sphärischen Roboters mit hoher Manövrierfähigkeit
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Deutsch
- Anmerkungen
-
Magdeburg, Universität, Diss.
- Klassifikation
-
Elektrotechnik, Elektronik
- Schlagwort
-
Mobiler Roboter
Kugel
Rollbewegung
Bahnplanung
Manövrierfähigkeit
Hindernis
Sprung
Kreiselgerät
Steuerungssystem
Prototyp
Roboter
Manövrierfähigkeit
- Ereignis
-
Veröffentlichung
- (wo)
-
Magdeburg
- (wer)
-
Universitätsbibliothek
- (wann)
-
2015
- Urheber
-
Bilous, Vadym
- Beteiligte Personen und Organisationen
- URN
-
urn:nbn:de:gbv:ma9:1-7428
- Rechteinformation
-
Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
15.08.20252025, 07:28 MESZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Objekttyp
- Hochschulschrift
Beteiligte
- Bilous, Vadym
- Schmucker, Ulrich
- Lüder, Arndt
- Palis, Stefan
- Universitätsbibliothek
Entstanden
- 2015
Ähnliche Objekte (12)

zur sphärischen Trigonometrie
Studie zu sphärischen Konstruktionen

Lehrbuch der sphärischen Astronomie

Anfangsgründe der sphärischen Trigomometrie.
Grundtatsachen der sphärischen Astronomie
Kinematik der sphärischen Schubkurbel
Untersuchung der sphaerischen Abbildung.
Aufgaben der sphärischen Astronomie
Aufgaben der sphärischen Astronomie
Lagerschwingungen bei sphärischen Getrieben
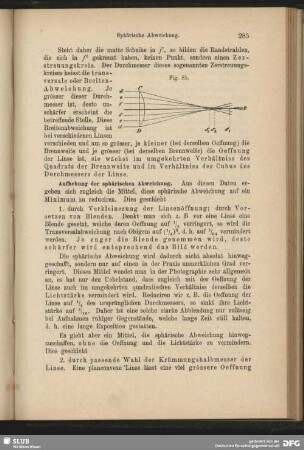
Aufhebung der sphärischen Abweichung
Lehrbuch der sphärischen Astronomie
zur sphärischen Trigonometrie
Studie zu sphärischen Konstruktionen
Lehrbuch der sphärischen Astronomie
Anfangsgründe der sphärischen Trigomometrie.
Grundtatsachen der sphärischen Astronomie
Kinematik der sphärischen Schubkurbel
Untersuchung der sphaerischen Abbildung.
Aufgaben der sphärischen Astronomie
Aufgaben der sphärischen Astronomie
Lagerschwingungen bei sphärischen Getrieben
Aufhebung der sphärischen Abweichung
Lehrbuch der sphärischen Astronomie
zur sphärischen Trigonometrie
Studie zu sphärischen Konstruktionen
Lehrbuch der sphärischen Astronomie
Anfangsgründe der sphärischen Trigomometrie.
Grundtatsachen der sphärischen Astronomie
Kinematik der sphärischen Schubkurbel
Untersuchung der sphaerischen Abbildung.
Aufgaben der sphärischen Astronomie
Aufgaben der sphärischen Astronomie
Lagerschwingungen bei sphärischen Getrieben
Aufhebung der sphärischen Abweichung