Sampling-basierte Roadmaps für Unbemannte Luftfahrzeuge zur eigenständigen Durchführung von Aufgaben in strukturreicher Umgebung
- Weitere Titel
-
Sampling-based roadmaps for unmanned aircraft for autonomous task execution in structurally rich environments
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Deutsch
- Anmerkungen
-
Berlin, Technische Universität Berlin, Dissertation, 2024
- Schlagwort
-
Bahnplanung
Flugkörper
- Ereignis
-
Veröffentlichung
- (wo)
-
Berlin
- (wer)
-
Technische Universität Berlin
- (wann)
-
2024
- Urheber
-
Adolf, Florian-Michael
- Beteiligte Personen und Organisationen
-
Uijt de Haag, Maarten
Levedag, Stefan
- DOI
-
10.14279/depositonce-22362
- Handle
-
11303/23548
- URN
-
urn:nbn:de:101:1-2412250103414.451400454662
- Rechteinformation
-
Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
15.08.2025, 07:37 MESZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Beteiligte
- Adolf, Florian-Michael
- Uijt de Haag, Maarten
- Levedag, Stefan
- Technische Universität Berlin
Entstanden
- 2024
Ähnliche Objekte (12)

Militärdrohnen : unbemannte Luftfahrzeuge (UAVs)
Richtlinie zur Eigenständigen Regionalentwicklung
... zum eigenständigen Ortsteil Wiesenfeld
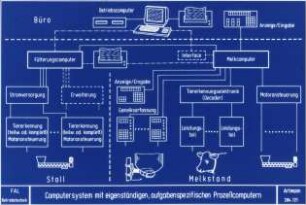
Computersystem mit eigenständigen, aufgabenspezifischen Prozeßcomputern
Tanzania : Versuch e. eigenständigen Entwicklung
Errichtung der eigenständigen Pfarrgemeinde Gaustadt

Kognitives Assistenzsystem zur Führung unbemannter Luftfahrzeuge in bemannt-unbemannten Flugmissionen

II.2: Die Herausbildung einer eigenständigen Bildsprache
Von der Hinterbliebenenrente zur eigenständigen Sicherung
Psychotherapiewissenschaft : Grundlagen einer eigenständigen wissenschaftlichen Disziplin
Gestaltung einer eigenständigen Finanzwirtschaft der Unternehmen
Prüfung der Förderung der Eigenständigen Regionalentwicklung
Militärdrohnen : unbemannte Luftfahrzeuge (UAVs)
Richtlinie zur Eigenständigen Regionalentwicklung
... zum eigenständigen Ortsteil Wiesenfeld
Computersystem mit eigenständigen, aufgabenspezifischen Prozeßcomputern
Tanzania : Versuch e. eigenständigen Entwicklung
Errichtung der eigenständigen Pfarrgemeinde Gaustadt
Kognitives Assistenzsystem zur Führung unbemannter Luftfahrzeuge in bemannt-unbemannten Flugmissionen
II.2: Die Herausbildung einer eigenständigen Bildsprache
Von der Hinterbliebenenrente zur eigenständigen Sicherung
Psychotherapiewissenschaft : Grundlagen einer eigenständigen wissenschaftlichen Disziplin
Gestaltung einer eigenständigen Finanzwirtschaft der Unternehmen
Prüfung der Förderung der Eigenständigen Regionalentwicklung
Militärdrohnen : unbemannte Luftfahrzeuge (UAVs)
Richtlinie zur Eigenständigen Regionalentwicklung
... zum eigenständigen Ortsteil Wiesenfeld
Computersystem mit eigenständigen, aufgabenspezifischen Prozeßcomputern
Tanzania : Versuch e. eigenständigen Entwicklung
Errichtung der eigenständigen Pfarrgemeinde Gaustadt
Kognitives Assistenzsystem zur Führung unbemannter Luftfahrzeuge in bemannt-unbemannten Flugmissionen
II.2: Die Herausbildung einer eigenständigen Bildsprache
Von der Hinterbliebenenrente zur eigenständigen Sicherung
Psychotherapiewissenschaft : Grundlagen einer eigenständigen wissenschaftlichen Disziplin
Gestaltung einer eigenständigen Finanzwirtschaft der Unternehmen