Optimization-based iterative learning control applied to a quadrotor system
Abstract: In this work we develop an Optimization-based Iterative Learning Control (OptILC) approach for reference trajectory tracking problems with the aim to improve the tracking performance of a quadrotor in flights affected by the so-called ground effect. The OptILC is designed to improve the tracking performance through iterative learning from repeatedly executed tasks. In each iteration the OptILC generates a feasible reference and corresponding optimal open-loop controls with respect to a possibly nonlinear and constrained nominal model of the plant. The controls and the feasible reference are obtained by solving an Optimal Control Problem (OCP) with the objective to track a desired reference. Due to a model-plant mismatch the tracking of the real system might be inaccurate, which is why the nominal model is iteratively corrected using the data of previous iterations. As the OptILC is an open-loop control approach, we combine it with a Linear Quadratic Regulator (LQR) acting in closed-loop to make the overall setup robust against stochastic disturbances. We analyze the convergence properties of the approach with a simplified two-dimensional quadrotor and an actual quadrotor system in simulation. Finally, we apply the OptILC to a tethered quadrotor in an experiment, in which we show that the tracking performance of the quadrotor, affected by the ground effect, can be improved
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Englisch
- Anmerkungen
-
Universität Freiburg, Masterarbeit, 2021
- Klassifikation
-
Elektrotechnik, Elektronik
- Schlagwort
-
Iterativ
Regelungstechnik
Maschinelles Lernen
Optimalwertregelung
Quadrocopter
Modellprädiktive Regelung
Optimierung
Masterarbeit
Experiment
- Ereignis
-
Veröffentlichung
- (wo)
-
Freiburg
- (wer)
-
Universität
- (wann)
-
2021
- Urheber
-
Eckl, Ephraim Johannes Emil
- DOI
-
10.6094/UNIFR/219154
- URN
-
urn:nbn:de:bsz:25-freidok-2191547
- Rechteinformation
-
Kein Open Access; Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
-
14.08.2025, 10:56 MESZ
Datenpartner
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Beteiligte
- Eckl, Ephraim Johannes Emil
- Universität
Entstanden
- 2021
Ähnliche Objekte (12)

Optimization-based reliability control of mechatronic systems

Optimization-based reliability control of mechatronic systems
Robust optimization-based commodity portfolio performance
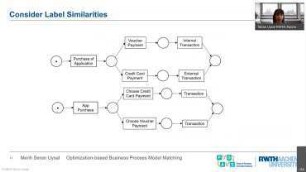
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-based design and control of a spinal exoskeleton and feedback system
Efficient operation scheduling for adsorption chillers using predictive optimization-based control methods
Optimization-Based Reachability Analysis for Landing Scenarios
Optimization-based approaches to analyze metabolomics data
Optimization-based synthesis of hybrid separation processes
Optimization-based Approaches to Extreme Event Analysis
Optimization-based reliability control of mechatronic systems
Optimization-based reliability control of mechatronic systems
Robust optimization-based commodity portfolio performance
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-based design and control of a spinal exoskeleton and feedback system
Efficient operation scheduling for adsorption chillers using predictive optimization-based control methods
Optimization-Based Reachability Analysis for Landing Scenarios
Optimization-based approaches to analyze metabolomics data
Optimization-based synthesis of hybrid separation processes
Optimization-based Approaches to Extreme Event Analysis
Optimization-based reliability control of mechatronic systems
Optimization-based reliability control of mechatronic systems
Robust optimization-based commodity portfolio performance
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-Based Business Process Model Matching
Optimization-based design and control of a spinal exoskeleton and feedback system
Efficient operation scheduling for adsorption chillers using predictive optimization-based control methods
Optimization-Based Reachability Analysis for Landing Scenarios
Optimization-based approaches to analyze metabolomics data
Optimization-based synthesis of hybrid separation processes