Hochschulschrift
Ein Konzept zur optimalen Steuerung und Regelung von mobilen Manipulatoren
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- ISBN
-
9783183569083
3183569086
- Maße
-
21 cm
- Umfang
-
X, 186 S.
- Ausgabe
-
Als Ms. gedr.
- Sprache
-
Deutsch
- Anmerkungen
-
Ill., graph. Darst.
Zugl.: München, Techn. Univ., Diss.
- Erschienen in
-
Fortschritt-Berichte VDI / Verein Deutscher Ingenieure ; Nr. 569, Reihe 08
- Schlagwort
-
Mobiler Roboter
Knickarmroboter
Werkzeug
Positioniergenauigkeit
Bahnabweichung
Optimalwertregelung
- Ereignis
-
Veröffentlichung
- (wo)
-
Düsseldorf
- (wer)
-
VDI-Verl.
- (wann)
-
1996
- Urheber
-
Miksch, Willy
- Inhaltsverzeichnis
- Rechteinformation
-
Bei diesem Objekt liegt nur das Inhaltsverzeichnis digital vor. Der Zugriff darauf ist unbeschränkt möglich.
- Letzte Aktualisierung
-
11.06.2025, 14:08 MESZ
Datenpartner
Dieses Objekt wird bereitgestellt von:
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Objekttyp
- Hochschulschrift
Beteiligte
- Miksch, Willy
- VDI-Verl.
Entstanden
- 1996
Ähnliche Objekte (12)

Ein Konzept zur optimalen Steuerung und Regelung von mobilen Manipulatoren
Selbstkalibrierung von mobilen Manipulatoren basierend auf strukturiertem Licht

Komfortzone mobiler Manipulatoren
Steuerung eines mobilen Roboters mit evolvierten Merkmalsdetektoren
Molekularvisualisierung und Remote-Steuerung auf mobilen Endgeräten
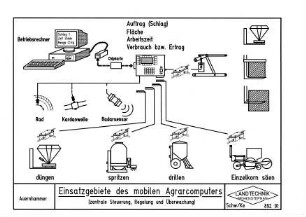
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
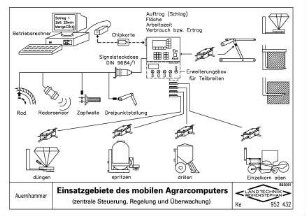
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
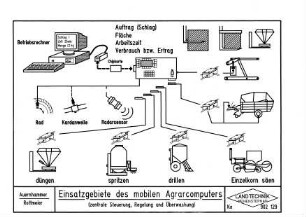
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Verteilte Steuerung von kooperativen autonomen mobilen Robotern für Transportaufgaben
Untersuchung des Leistungseinsparpotentials von mobilen Kommunikationsendgeräten durch betriebsabhängige Steuerung
Strahlungstechnische Sensoren zur Steuerung von mobilen Aggregaten und Werkzeugen
Planung und Steuerung von Abläufen in linienlosen mobilen Montagesystemen
Ein Konzept zur optimalen Steuerung und Regelung von mobilen Manipulatoren
Selbstkalibrierung von mobilen Manipulatoren basierend auf strukturiertem Licht
Komfortzone mobiler Manipulatoren
Steuerung eines mobilen Roboters mit evolvierten Merkmalsdetektoren
Molekularvisualisierung und Remote-Steuerung auf mobilen Endgeräten
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Verteilte Steuerung von kooperativen autonomen mobilen Robotern für Transportaufgaben
Untersuchung des Leistungseinsparpotentials von mobilen Kommunikationsendgeräten durch betriebsabhängige Steuerung
Strahlungstechnische Sensoren zur Steuerung von mobilen Aggregaten und Werkzeugen
Planung und Steuerung von Abläufen in linienlosen mobilen Montagesystemen
Ein Konzept zur optimalen Steuerung und Regelung von mobilen Manipulatoren
Selbstkalibrierung von mobilen Manipulatoren basierend auf strukturiertem Licht
Komfortzone mobiler Manipulatoren
Steuerung eines mobilen Roboters mit evolvierten Merkmalsdetektoren
Molekularvisualisierung und Remote-Steuerung auf mobilen Endgeräten
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Einsatzgebiete des mobilen Agrarcomputers (zentrale Steuerung, Regelung und Überwachung)
Verteilte Steuerung von kooperativen autonomen mobilen Robotern für Transportaufgaben
Untersuchung des Leistungseinsparpotentials von mobilen Kommunikationsendgeräten durch betriebsabhängige Steuerung
Strahlungstechnische Sensoren zur Steuerung von mobilen Aggregaten und Werkzeugen