PUMA: Deep Metric Imitation Learning for Stable Motion Primitives
Imitation learning (IL) facilitates intuitive robotic programming. However, ensuring the reliability of learned behaviors remains a challenge. In the context of reaching motions, a robot should consistently reach its goal, regardless of its initial conditions. To meet this requirement, IL methods often employ specialized function approximators that guarantee this property by construction. Although effective, these approaches come with some limitations: 1) they are typically restricted in the range of motions they can model, resulting in suboptimal IL capabilities, and 2) they require explicit extensions to account for the geometry of motions that consider orientations. To address these challenges, we introduce a novel stability loss function that does not constrain the function approximator's architecture and enables learning policies that yield accurate results. Furthermore, it is not restricted to a specific state space geometry; therefore, it can easily incorporate the geometry of the robot's state space. Proof of the stability properties induced by this loss is provided and the method is empirically validated in various settings. These settings include Euclidean and non‐Euclidean state spaces, as well as first‐order and second‐order motions, both in simulation and with real robots. More details about the experimental results can be found at https://youtu.be/ZWKLGntCI6w.
- Location
-
Deutsche Nationalbibliothek Frankfurt am Main
- Extent
-
Online-Ressource
- Language
-
Englisch
- Bibliographic citation
-
PUMA: Deep Metric Imitation Learning for Stable Motion Primitives ; day:14 ; month:10 ; year:2024 ; extent:20
Advanced intelligent systems ; (14.10.2024) (gesamt 20)
- Creator
-
Pérez‐Dattari, Rodrigo
Della Santina, Cosimo
Kober, Jens
- DOI
-
10.1002/aisy.202400144
- URN
-
urn:nbn:de:101:1-2410141419258.948051840238
- Rights
-
Open Access; Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Last update
- 15.08.2025, 5:36 AM UTC
Data provider
Deutsche Nationalbibliothek. If you have any questions about the object, please contact the data provider.
Associated
- Pérez‐Dattari, Rodrigo
- Della Santina, Cosimo
- Kober, Jens
Other Objects (12)
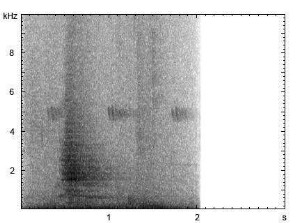
Puma | Puma concolor - Ruf
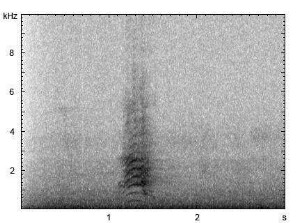
Puma | Puma concolor - Ruf
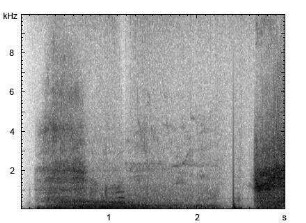
Puma | Puma concolor - Ruf

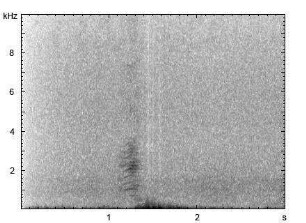
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf

Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf
Puma | Puma concolor - Ruf