Sliding mode control of electro-hydraulic servo system based on double observers
Abstract In this paper, in order to solve the real-time state value acquisition and external-disturbance problems faced during the working process of an electro-hydraulic servo system, a sliding mode controller based on dual observers is designed, which enables the system to effectively acquire the state value and realize better control accuracy. The method uses a high-gain observer to obtain the system state in real time and then adds a perturbation observer to provide more accurate state and perturbation observations for the sliding mode controller. The dual observer observes the obtained states and external perturbations and feeds these back to the sliding mode controller to control the system accurately. Finally, the observation performance of the observers is verified by comparative simulation, and the proposed control method can improve the control accuracy.
- Standort
-
Deutsche Nationalbibliothek Frankfurt am Main
- Umfang
-
Online-Ressource
- Sprache
-
Englisch
- Erschienen in
-
Sliding mode control of electro-hydraulic servo system based on double observers ; volume:15 ; number:1 ; year:2024 ; pages:77-85 ; extent:9
Mechanical sciences ; 15, Heft 1 (2024), 77-85 (gesamt 9)
- Urheber
-
Su, Xiaoyu
Zheng, Xinyu
- DOI
-
10.5194/ms-15-77-2024
- URN
-
urn:nbn:de:101:1-2024021503220542669935
- Rechteinformation
-
Open Access; Der Zugriff auf das Objekt ist unbeschränkt möglich.
- Letzte Aktualisierung
- 15.08.2025, 07:23 MESZ
Datenpartner
Deutsche Nationalbibliothek. Bei Fragen zum Objekt wenden Sie sich bitte an den Datenpartner.
Beteiligte
- Su, Xiaoyu
- Zheng, Xinyu
Ähnliche Objekte (12)

Electro-hydraulic SWOT-analysis on electro-hydraulic drives in construction machinery
Fault-tolerant control of an electro-hydraulic servo axes with a duplex-valve-system
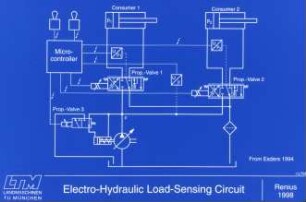
Electro-Hydraulic Load-Sensing Circuit

Self-energizing electro-hydraulic brake
Self-energizing electro-hydraulic brake
Active fault tolerant control of an electro-hydraulic servo axis with a duplex-valve-system
Fault-tolerant control for an electro-hydraulic servo system with sensor fault compensation and disturbance rejection
Force Compensation Control for Electro-Hydraulic Servo System with Pump–Valve Compound Drive via QFT–DTOC
Analysis of the static and dynamic characteristics of the electro-hydraulic pressure servo valve of robot
Design and Verification of An Open-Circuit Electro-Hydraulic Actuator System with An Integrated Electro-Hydraulic Unit
Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules
Nonlinear robust control of electro-hydraulic systems
Electro-hydraulic SWOT-analysis on electro-hydraulic drives in construction machinery
Fault-tolerant control of an electro-hydraulic servo axes with a duplex-valve-system
Electro-Hydraulic Load-Sensing Circuit
Self-energizing electro-hydraulic brake
Self-energizing electro-hydraulic brake
Active fault tolerant control of an electro-hydraulic servo axis with a duplex-valve-system
Fault-tolerant control for an electro-hydraulic servo system with sensor fault compensation and disturbance rejection
Force Compensation Control for Electro-Hydraulic Servo System with Pump–Valve Compound Drive via QFT–DTOC
Analysis of the static and dynamic characteristics of the electro-hydraulic pressure servo valve of robot
Design and Verification of An Open-Circuit Electro-Hydraulic Actuator System with An Integrated Electro-Hydraulic Unit
Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules
Nonlinear robust control of electro-hydraulic systems
Electro-hydraulic SWOT-analysis on electro-hydraulic drives in construction machinery
Fault-tolerant control of an electro-hydraulic servo axes with a duplex-valve-system
Electro-Hydraulic Load-Sensing Circuit
Self-energizing electro-hydraulic brake
Self-energizing electro-hydraulic brake
Active fault tolerant control of an electro-hydraulic servo axis with a duplex-valve-system
Fault-tolerant control for an electro-hydraulic servo system with sensor fault compensation and disturbance rejection
Force Compensation Control for Electro-Hydraulic Servo System with Pump–Valve Compound Drive via QFT–DTOC
Analysis of the static and dynamic characteristics of the electro-hydraulic pressure servo valve of robot
Design and Verification of An Open-Circuit Electro-Hydraulic Actuator System with An Integrated Electro-Hydraulic Unit
Research on the characteristics of electro-hydraulic position servo system of RBF neural network under fuzzy rules